




1. バルブコア組立工程の難しさ
本研究では、他の自動組立システムの設計経験を吸収した後、既存の半自動組立システムを分析し、システムの機械部分をシミュレーションに基づいて完全に設計しました。バルブコア組立工程。システム設計計画では、機械部品の加工を簡便化し、コストを最小限に抑え、部品の組立を簡便にし、システムに一定の開放性と拡張性を持たせることで、システムの信頼性と効率性を高め、システムのコストパフォーマンスを向上させるための良好な基盤を築くことを目指しています。
そのバルブコア組立システムは、機械構造設計上、主に3つの部分に分かれています。作業台の左上隅に2つの組立部品、左下隅に3つの組立部品、作業台の右側に7つの組立部品があります。2ピース組立の技術的な難しさは、シーリングリングの円形形状をどのように確保するかにあります。切断工程では、ブレードの軸方向の押し出し力を受けるため、変形しやすいです。第二に、組立工程中に、搬送ツール部品でコアロッドが検出された場合、ドアコアの異なる部品間の振動による選別と組立を実現する必要があります。そのため、各部品は対応する位置に落ちて組立リンクになります。プロセスの難しさはここにあります。上記の問題は、この段階でバルブコア組立の不良品率が上昇する主な原因です。これに基づいて、本稿では、バルブコア組立のプロセスを最適化し、品質検査システムを追加して、バルブコア組立の合格率を向上させます。
2. インテリジェントバルブコア組立方式
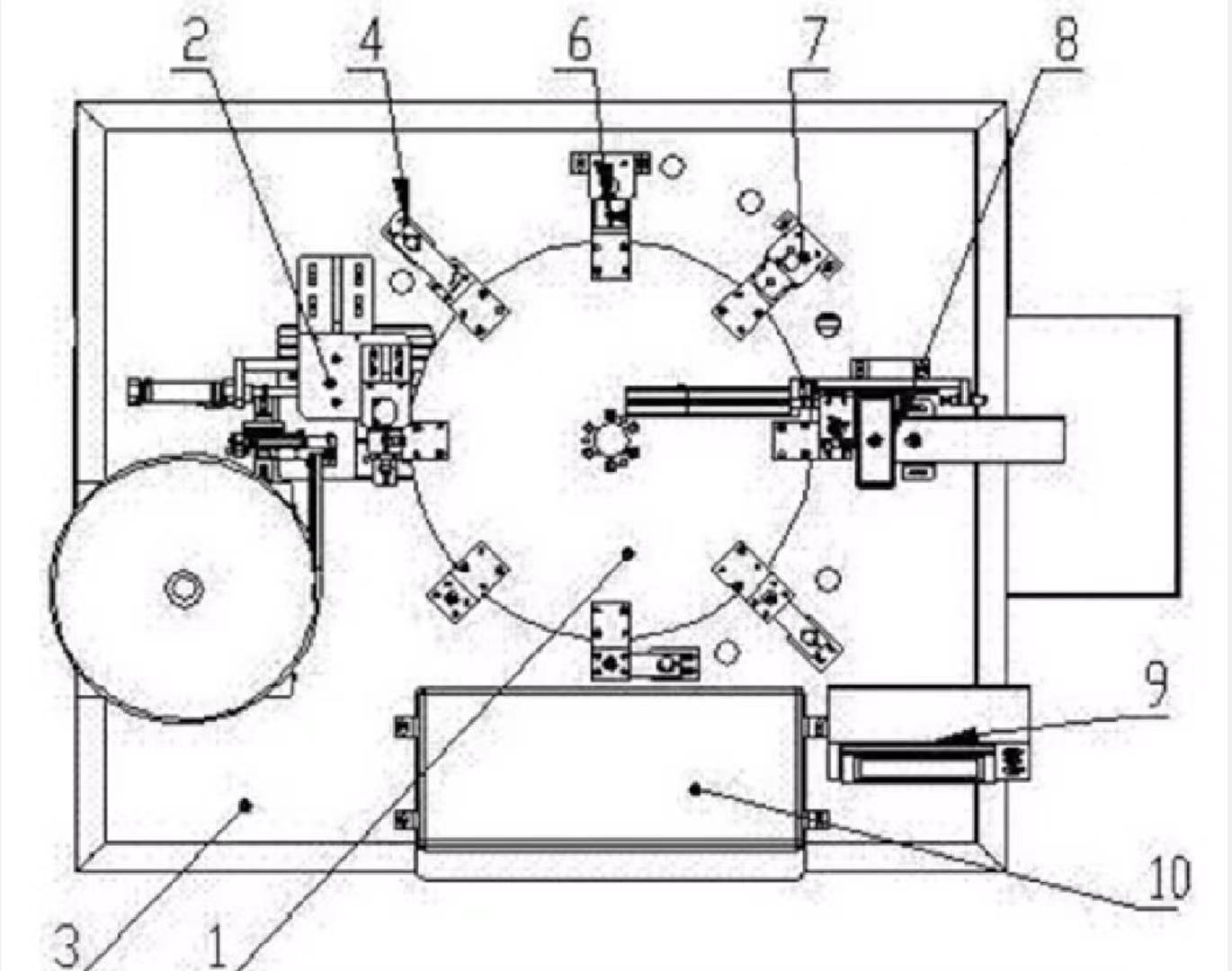
操作インターフェースとPLCは論理制御部を形成し、検出システムとPLCは双方向の情報フローを通じて組立システムの状態データを収集し、制御信号を出力します。実行部である駆動システムは、PLC出力部によって直接制御されます。手動操作が必要な供給システムを除き、本システムの他の工程はインテリジェント組立を実現しています。タッチスクリーンを介して良好なヒューマンコンピュータインタラクションを実現します。機械設計においては、操作の利便性を考慮し、ドアコア配置ボックスをタッチスクリーンに隣接させています。検出機構、ドアコア上面開放吹出部品、バルブコア高さ検出部品、ブランキング機構は、ターンテーブルツール部品の周囲にそれぞれ配置され、ドアコア組立の組立ライン生産レイアウトを実現しています。検出システムは、主にコアロッド検出、設置高さ検出、品質検査などを行い、材料選定やバルブコアロックの自動化を実現するだけでなく、組立工程の安定性と高効率性を確保します。システムの各ユニットの構造を図1に示します。.
下図に示すように、ターンテーブルは全工程の中心となるリンクであり、ターンテーブルの駆動によってバルブコアの組み立てが完了します。第2検出機構は組み立てる部品を検出すると制御システムに信号を送り、制御システムは各工程ユニットの作業を調整します。まず、振動ディスクがドアコアを振り出し、吸気バルブ口にロックします。第1検出機構は、正常に取り付けられなかったバルブコアを不良品として直接選別します。部品6はバルブコアの通気性が適格かどうかを検出し、部品7はバルブコアの取り付け高さが規格を満たしているかどうかを検出します。上記の3つのリンクで合格した製品のみが良品ボックスに取り込まれ、そうでない場合は不良品として扱われます。
インテリジェントな組み立てバルブコアシステム設計の技術的な難しさです。この設計では、3シリンダー設計を採用しています。スライドシリンダーは排出を制御し、排出の一意性を確保します。2番目のシリンダーは、ロックロッドが排出口に位置合わせされていることを確認し、スライドシリンダーと連携してバルブコアがロックロッドに入るのを完了します。その後、2番目のシリンダーはロック機構全体を押し続け、吸引ノズルはツールの底部に到達するとバルブを吸引します。最後に、3番目のシリンダーがロック機構を押し込んだ後、サーボモーターがバルブコアを吸気バルブ口に送り、バルブコアの組み立てを完了します。このプロセスにより、縦方向と横方向の移動位置の精度と一意性が保証され、ドアコアの組み立てにおける技術的な難しさに対する優れたソリューションが提供されます。.
3. バルブコア組立システムの主要部品の設計
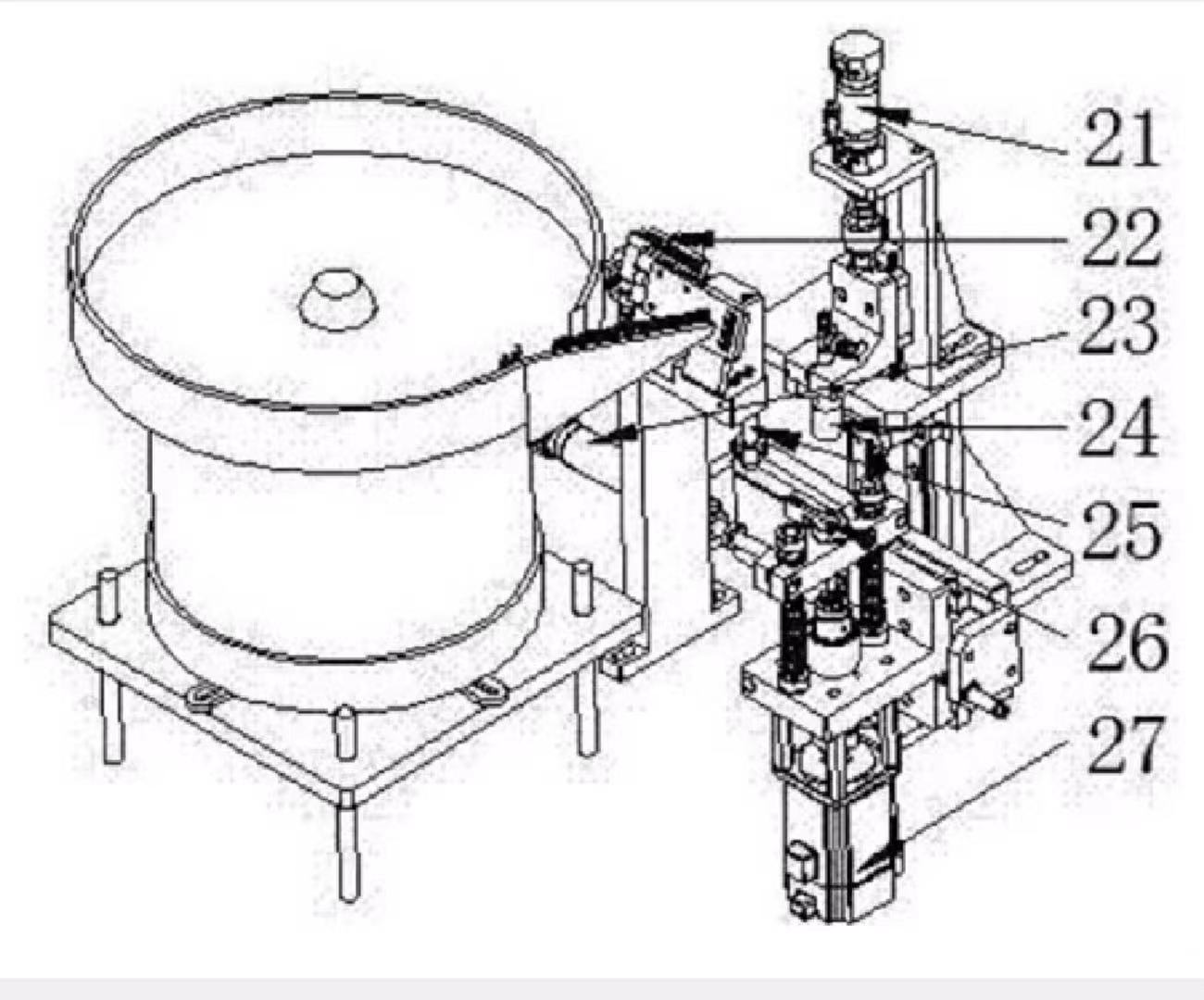
インストールの重要なプロセスとして、バルブコアバルブにおいて、バルブコアのロックは、バルブコアの移動位置の精度に対する要求が非常に高いため、縦方向と横方向の機構の調整が必要です。 この部分の設計では、バルブコアの排出動作、ロックレバーのロック動作、およびバルブコアをバルブノズルに装着する動作という単一の動作に分解されています。 その機械構造を図2に示します。 図2からわかるように、バルブコアアセンブリの機械構造は3つの部分に分かれています。 3つの部分は互いに影響を与えることなく連携して動作します。 独立した動作が完了すると、シリンダーが機構を押して次のアセンブリ位置に移動します。
移動位置の精度を確保するため、電気制御と機械制御の総合的な設計を採用し、誤差を1.4mm以内に抑えています。バルブコアとバルブノズルの中心は同軸になっており、サーボモーターがバルブコアをスムーズにバルブノズルに押し込むことができます。そうでないと部品が損傷する恐れがあります。機械構造の失速や電気信号の異常なパルスは、組み立て作業にわずかな偏差を引き起こす可能性があります。その結果、バルブコアを組み立てた後、通気性能が基準を満たさず、組み立て高さが不適切になり、製品の故障につながります。システム設計ではこの点を十分に考慮し、エアブロー検出と高さ検出によって不良品を選別しています。.
投稿日時: 2022年9月9日
